分布式驅(qū)動(dòng):通過獨(dú)立控制車輪輸出扭矩,實(shí)現(xiàn)復(fù)雜路面輪端扭矩精確控制�,使操控性能更加穩(wěn)定,并通過左右車輪不同轉(zhuǎn)速輸出�����,實(shí)現(xiàn)矢量差速功能�。進(jìn)而提升整車操控性能,支持坦克轉(zhuǎn)向�、四輪轉(zhuǎn)向、漂移模式�����、單輪脫困等功能����。
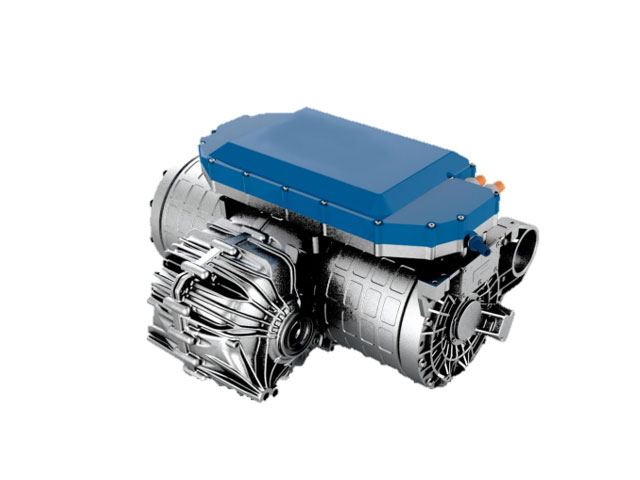
結(jié)構(gòu)緊湊:雙電機(jī)分布式電驅(qū)單元,集成兩個(gè)驅(qū)動(dòng)電機(jī)�、兩個(gè)控制器和兩個(gè)減速器���,總成采用T型布置方式,減速器采用平行軸布置方式���,取消傳統(tǒng)差速器,控制器與EDU深度集成���,冷卻系統(tǒng)共用���。
客戶定制化:只通過軟件設(shè)定就可以動(dòng)態(tài)調(diào)整駕駛感覺 ,滿足不同定位的整車需求(僅受軟件影響)�����,通過模塊化軟件可擴(kuò)展軟件功能(如根據(jù)駕駛員�����,學(xué)習(xí)密鑰�,車隊(duì)管理,位置��,街道特征來調(diào)整駕駛特性����。)