Distributed drive:By independently controlling the wheel output torque, our EDU products can accurately control the wheel-end torque on complex roads, making the handling performance more stable. By outputting different rotational speeds between the left and right wheels, they realize the vector differential function. In this way, they improve the handling performance of the vehicle, and enable G turn, four-wheel steering, drift mode and single-wheel escape.
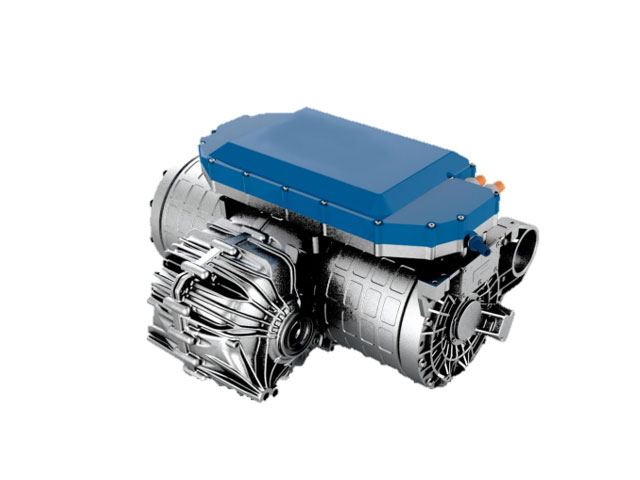
Compact structure:The dual-motor distributed EDU integrates two drive motors, two controllers and two reducers. The EDU adopts T-shaped arrangement, while the reducers adopt parallel axis arrangement, eliminating the need for a traditional differential. The controller is deeply integrated with EDU, with the cooling system shared by them.
Customization: Dynamically adjustable driving feeling only through software setting, meeting the needs of vehicles with different custom(only affected by software); modular software with scalable functions (e.g., adjusting driving characteristics according to drivers, learning keys, fleet management, locations and street characteristics).